All Lines Tangent to Four Spheres¶
Consider all tangent lines to four mutually touching spheres.
The original formulation as polynomial system came from Cassiano Durand, then at the CS department in Purdue. The positioning of the centers of the spheres, each with radius 0.5 at the vertices of a tetrahedron came from Thorsten Theobald, then at TU Muenich. The centers of the four spheres are
Let \(t = (x_0, x_1, x_2)\) be the tangent vector and \(m = (x_3, x_4, x_5)\) the moment vector.
The first equation is \(\|t\|=1\), the second \(m \cdot t = 0\), the other equations are \(\|m - c_i \times t \|^2 - r^2 = 0\) where the radius \(r = 1/2\).
from sympy import var, sqrt
from sympy.vector import CoordSys3D, Vector
import matplotlib.pyplot as plt
import numpy as np
from phcpy.solver import solve
from phcpy.solutions import coordinates
centers and radii¶
Choices of the centers and radii of four mutually tangent spheres are defined here.
ctr1 = (0, 0, 0)
ctr2 = (1, 0, 0)
ctr3 = (0.5, sqrt(3.0)/2, 0)
ctr4 = (0.5, sqrt(3.0)/6, sqrt(6.0)/3)
radius = 0.5
centers = [ctr1, ctr2, ctr3, ctr4]
The choices were made for the suitability of the plot. Other choices can be found in the paper by Frank Sottile and Thorsten Theobald: Line problems in nonlinear computational geometry. In Computational Geometry - Twenty Years Later, pages 411-432, edited by J.E. Goodman, J. Pach, and R. Pollack, AMS, 2008.
formulating the equations¶
We need some vector calculus, done with sympy.
N = CoordSys3D('N')
x0, x1, x2 = var('x0, x1, x2')
vt = Vector.zero + x0*N.i + x1*N.j + x2*N.k
normt = vt.dot(vt) - 1
normt
which produces the first equation
x0**2 + x1**2 + x2**2 - 1
The second equation is
x0*x3 + x1*x4 + x2*x5
is computed by the code
x3, x4, x5 = var('x3, x4, x5')
vm = Vector.zero + x3*N.i + x4*N.j + x5*N.k
momvt = vt.dot(vm)
The radii are [0.5, 0.5, 0.5, 0.5] defined by
radii = [radius for _ in range(4)]
The polynomial system is constructed by
eqs = [normt, momvt]
for (ctr, rad) in zip(centers, radii):
vc = Vector.zero + ctr[0]*N.i + ctr[1]*N.j + ctr[2]*N.k
left = vm - vc.cross(vt)
equ = left.dot(left) - rad**2
eqs.append(equ)
To apply the blackbox solver, we have to convert the polynomials to strings.
fourspheres = []
print('the polynomial system :')
for pol in eqs:
print(pol)
fourspheres.append(str(pol) + ';')
The output to the above code cell is
the polynomial system :
x0**2 + x1**2 + x2**2 - 1
x0*x3 + x1*x4 + x2*x5
x3**2 + x4**2 + x5**2 - 0.25
x3**2 + (-x1 + x5)**2 + (x2 + x4)**2 - 0.25
(-0.866025403784439*x2 + x3)**2 + (0.5*x2 + x4)**2 + (0.866025403784439*x0 - 0.5*x1 + x5)**2 - 0.25
(-0.816496580927726*x0 + 0.5*x2 + x4)**2 + (0.288675134594813*x0 - 0.5*x1 + x5)**2 + (0.816496580927726*x1 - 0.288675134594813*x2 + x3)**2 - 0.25
So, we have six polynomial equations in six unknowns.
solving the problem¶
Now we call the blackbox solver.
sols = solve(fourspheres)
for (idx, sol) in enumerate(sols):
print('Solution', idx+1, ':')
print(sol)
The solution list is shown below:
Solution 1 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : 1.82013100766029E-16 2.92227989168779E-16
x1 : -8.16496580927726E-01 -2.50326444773076E-17
x2 : -5.77350269189626E-01 3.54015053218724E-17
x3 : 6.04879596033482E-17 3.06586029409515E-17
x4 : 2.88675134594813E-01 -1.77007526609362E-17
x5 : -4.08248290463863E-01 -1.25163222386536E-17,
== err : 4.981E-16 = rco : 1.657E-17 = res : 3.821E-16 =
Solution 2 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : -7.07106781186547E-01 -2.17839875856796E-16
x1 : -4.08248290463863E-01 2.08243914343071E-16
x2 : 5.77350269189626E-01 -1.19547586767375E-16
x3 : 2.50000000000000E-01 -3.72860037233369E-31
x4 : -4.33012701892219E-01 2.77333911991762E-31
x5 : -1.99196604815539E-16 2.50510368981921E-16
== err : 1.118E-15 = rco : 2.133E-17 = res : 4.441E-16 =
Solution 3 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : 7.07106781186547E-01 1.37982017054626E-16
x1 : -4.08248290463863E-01 3.39894708038934E-18
x2 : 5.77350269189626E-01 -1.66589349202482E-16
x3 : 2.50000000000000E-01 -4.09837892165604E-31
x4 : -1.44337567297407E-01 1.66589349202482E-16
x5 : -4.08248290463863E-01 -5.88982292472640E-17
== err : 1.023E-15 = rco : 4.667E-17 = res : 3.331E-16 =
Solution 4 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : -7.07106781186547E-01 8.51323534940577E-17
x1 : 4.08248290463863E-01 -9.82010876877884E-18
x2 : -5.77350269189626E-01 -1.11209278833498E-16
x3 : -2.50000000000000E-01 6.61657084254124E-29
x4 : 1.44337567297406E-01 1.11209278833581E-16
x5 : 4.08248290463863E-01 -3.93184175971020E-17
== err : 2.006E-14 = rco : 1.477E-17 = res : 5.551E-16 =
Solution 5 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : 7.07106781186548E-01 2.00971395228568E-16
x1 : 4.08248290463863E-01 -2.45578336010813E-16
x2 : -5.77350269189626E-01 7.24885788968468E-17
x3 : -2.50000000000000E-01 -2.77333911991762E-31
x4 : 4.33012701892219E-01 -3.82104500966428E-31
x5 : -7.32462262249068E-17 -2.71206918859082E-16
== err : 7.741E-16 = rco : 4.417E-17 = res : 3.886E-16 =
Solution 6 :
t : 1.00000000000000E+00 0.00000000000000E+00
m : 4
the solution for t :
x0 : -3.22358540809185E-16 5.45289082605370E-16
x1 : 8.16496580927726E-01 -1.64014136987415E-17
x2 : 5.77350269189625E-01 2.31951016948522E-17
x3 : -1.74561355056418E-16 2.00875473111053E-17
x4 : -2.88675134594813E-01 -1.15975508474262E-17
x5 : 4.08248290463863E-01 -8.20070684937081E-18
== err : 5.471E-16 = rco : 1.448E-17 = res : 3.682E-16 =
Observe the m : 4 which indicates the multiplicy four
of each solution.
the tangent lines¶
The solutions contain the components of the tangent and the moment vectors from which the tangent lines can be computed.
def tangent_lines(solpts, verbose=True):
"""
Given in solpts is the list of solution points,
the tuples which respresent the tangent lines
are returned in a list.
Each tuple contains a point on the line
and the tangent vector.
"""
result = []
for point in solpts:
if verbose:
print(point, end='')
tan = Vector.zero + point[0]*N.i + point[1]*N.j + point[2]*N.k
mom = Vector.zero + point[3]*N.i + point[4]*N.j + point[5]*N.k
pnt = tan.cross(mom) # solves m = p x t
pntcrd = (pnt.dot(N.i), pnt.dot(N.j), pnt.dot(N.k))
tancrd = (tan.dot(N.i), tan.dot(N.j), tan.dot(N.k))
if verbose:
print(', appending :', pntcrd)
result.append((pntcrd, tancrd))
return result
The input to the tangent_lines function is computed below:
crd = [coordinates(sol) for sol in sols]
complexpoints = [values for (names, values) in crd]
points = []
for point in complexpoints:
vals = []
for values in point:
vals.append(values.real)
points.append(tuple(vals))
and then the tangents are computed as
tangents = tangent_lines(points)
plotting the lines¶
Let us first plot the four spheres…
%matplotlib widget
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
u = np.linspace(0, 2 * np.pi, 100)
v = np.linspace(0, np.pi, 100)
R = float(radius)
x1 = float(ctr1[0]) + R * np.outer(np.cos(u), np.sin(v))
y1 = float(ctr1[1]) + R * np.outer(np.sin(u), np.sin(v))
z1 = float(ctr1[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x2 = float(ctr2[0]) + R * np.outer(np.cos(u), np.sin(v))
y2 = float(ctr2[1]) + R * np.outer(np.sin(u), np.sin(v))
z2 = float(ctr2[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x3 = float(ctr3[0]) + R * np.outer(np.cos(u), np.sin(v))
y3 = float(ctr3[1]) + R * np.outer(np.sin(u), np.sin(v))
z3 = float(ctr3[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x4 = float(ctr4[0]) + R * np.outer(np.cos(u), np.sin(v))
y4 = float(ctr4[1]) + R * np.outer(np.sin(u), np.sin(v))
z4 = float(ctr4[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
# Plot the surfaces
sphere1 = ax.plot_surface(x1, y1, z1, alpha=0.8)
sphere2 = ax.plot_surface(x2, y2, z2, alpha=0.8)
sphere3 = ax.plot_surface(x3, y3, z3, alpha=0.8)
sphere3 = ax.plot_surface(x4, y4, z4, alpha=0.8)
# Set an equal aspect ratio
ax.set_aspect('equal')
plt.show()
The output of the code cell is in Fig. 12.
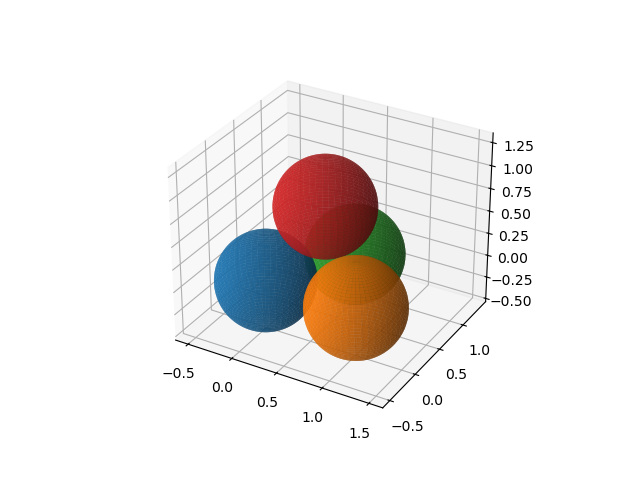
Fig. 12 Four touching spheres.¶
The second figure in Fig. 13 shows the tangent lines.
%matplotlib widget
ax = plt.figure().add_subplot(projection='3d')
# range of the tangent lines
theta = np.linspace(-2.5, 2.5, 10)
pnt1, tan1 = tangents[0]
x1 = float(pnt1[0]) + theta*tan1[0]
y1 = float(pnt1[1]) + theta*tan1[1]
z1 = float(pnt1[2]) + theta*tan1[2]
pnt2, tan2 = tangents[1]
x2 = float(pnt2[0]) + theta*tan2[0]
y2 = float(pnt2[1]) + theta*tan2[1]
z2 = float(pnt2[2]) + theta*tan2[2]
pnt3, tan3 = tangents[2]
x3 = float(pnt3[0]) + theta*tan3[0]
y3 = float(pnt3[1]) + theta*tan3[1]
z3 = float(pnt3[2]) + theta*tan3[2]
pnt4, tan4 = tangents[3]
x4 = float(pnt4[0]) + theta*tan4[0]
y4 = float(pnt4[1]) + theta*tan4[1]
z4 = float(pnt4[2]) + theta*tan4[2]
pnt5, tan5 = tangents[4]
x5 = float(pnt5[0]) + theta*tan5[0]
y5 = float(pnt5[1]) + theta*tan5[1]
z5 = float(pnt5[2]) + theta*tan5[2]
pnt6, tan6 = tangents[5]
x6 = float(pnt6[0]) + theta*tan6[0]
y6 = float(pnt6[1]) + theta*tan6[1]
z6 = float(pnt6[2]) + theta*tan6[2]
line1 = ax.plot(x1, y1, z1)
line2 = ax.plot(x2, y2, z2)
line3 = ax.plot(x3, y3, z3)
line4 = ax.plot(x4, y4, z4)
line5 = ax.plot(x5, y5, z5)
line6 = ax.plot(x6, y6, z6)
# Set an equal aspect ratio
ax.set_aspect('equal')
plt.show()
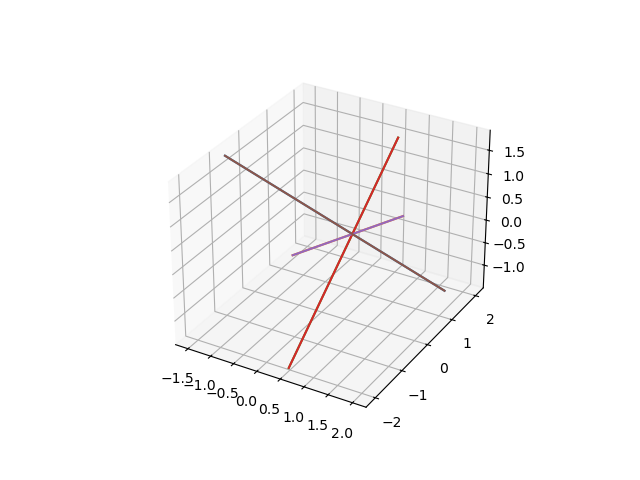
Fig. 13 The computed tangent lines.¶
And then we plot the spheres and the tangent lines:
%matplotlib widget
fig = plt.figure()
ax = fig.add_subplot(projection='3d')
u = np.linspace(0, 2 * np.pi, 100)
v = np.linspace(0, np.pi, 100)
R = float(radius)
x1 = float(ctr1[0]) + R * np.outer(np.cos(u), np.sin(v))
y1 = float(ctr1[1]) + R * np.outer(np.sin(u), np.sin(v))
z1 = float(ctr1[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x2 = float(ctr2[0]) + R * np.outer(np.cos(u), np.sin(v))
y2 = float(ctr2[1]) + R * np.outer(np.sin(u), np.sin(v))
z2 = float(ctr2[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x3 = float(ctr3[0]) + R * np.outer(np.cos(u), np.sin(v))
y3 = float(ctr3[1]) + R * np.outer(np.sin(u), np.sin(v))
z3 = float(ctr3[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
x4 = float(ctr4[0]) + R * np.outer(np.cos(u), np.sin(v))
y4 = float(ctr4[1]) + R * np.outer(np.sin(u), np.sin(v))
z4 = float(ctr4[2]) + R * np.outer(np.ones(np.size(u)), np.cos(v))
# Plot the surfaces
sphere1 = ax.plot_surface(x1, y1, z1, alpha=0.8)
sphere2 = ax.plot_surface(x2, y2, z2, alpha=0.8)
sphere3 = ax.plot_surface(x3, y3, z3, alpha=0.8)
sphere4 = ax.plot_surface(x4, y4, z4, alpha=0.8)
# range of the tangent lines
theta = np.linspace(-2.5, 2.5, 10)
pnt1, tan1 = tangents[0]
x1 = float(pnt1[0]) + theta*tan1[0]
y1 = float(pnt1[1]) + theta*tan1[1]
z1 = float(pnt1[2]) + theta*tan1[2
pnt2, tan2 = tangents[1]
x2 = float(pnt2[0]) + theta*tan2[0]
y2 = float(pnt2[1]) + theta*tan2[1]
z2 = float(pnt2[2]) + theta*tan2[2]
pnt3, tan3 = tangents[2]
x3 = float(pnt3[0]) + theta*tan3[0]
y3 = float(pnt3[1]) + theta*tan3[1]
z3 = float(pnt3[2]) + theta*tan3[2]
pnt4, tan4 = tangents[3]
x4 = float(pnt4[0]) + theta*tan4[0]
y4 = float(pnt4[1]) + theta*tan4[1]
z4 = float(pnt4[2]) + theta*tan4[2]
pnt5, tan5 = tangents[4]
x5 = float(pnt5[0]) + theta*tan5[0]
y5 = float(pnt5[1]) + theta*tan5[1]
z5 = float(pnt5[2]) + theta*tan5[2]
pnt6, tan6 = tangents[5]
x6 = float(pnt6[0]) + theta*tan6[0]
y6 = float(pnt6[1]) + theta*tan6[1]
z6 = float(pnt6[2]) + theta*tan6[2]
line1 = ax.plot(x1, y1, z1)
line2 = ax.plot(x2, y2, z2)
line3 = ax.plot(x3, y3, z3)
line4 = ax.plot(x4, y4, z4)
line5 = ax.plot(x5, y5, z5)
line6 = ax.plot(x6, y6, z6)
# Set an equal aspect ratio
ax.axes.set_xlim3d(-1.5, 1.5)
ax.axes.set_ylim3d(-1.5, 1.5)
ax.axes.set_zlim3d(-1.5, 1.5)
ax.set_aspect('equal')
ax.view_init(elev=30, azim=30, roll=0)
plt.show()
which produces Fig. 14.
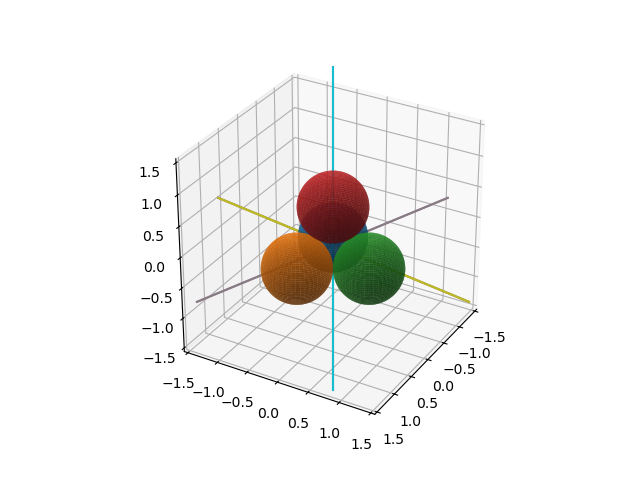
Fig. 14 All lines tangent to four spheres.¶