Filters and Stability¶
All filters we consider are linear, time invariant, and causal.
Linear, Time Invariant, Causal Filters¶
Every signal can be written as a linear combinations of sine functions running at increasing frequencies, as \(\sin(2\pi k t)\), \(k=1, 2, \ldots\), see Fig. 12 for the first sine function in this family. Frequencies are measured in Hertz (Hz): \(n\) Hz = \(n\) cycles per second.
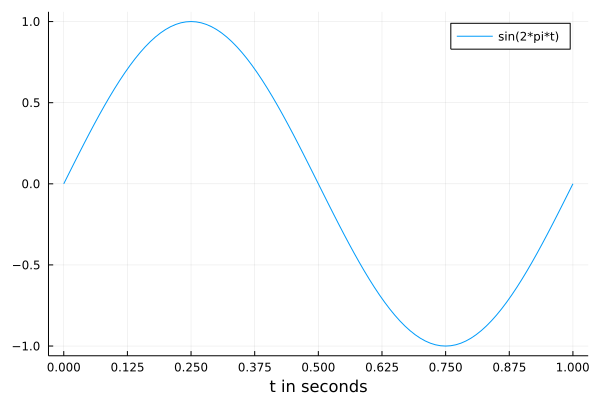
Fig. 12 Sine function running at 1 Hertz, one cycle per second.¶
Processing a continuous signal happens by taking samples. Sampling at 8 Hertz means taking 8 equidistant samples per second, as illustrated in Fig. 13. Our signal is the represented by \(\{ u_0, u_1, u_2, u_3, u_4, u_5, u_6, u_7, u_0, \ldots \}\), where \(u_k = \sin(2\pi k/8)\), \(k=0,1,2,\ldots,7\).
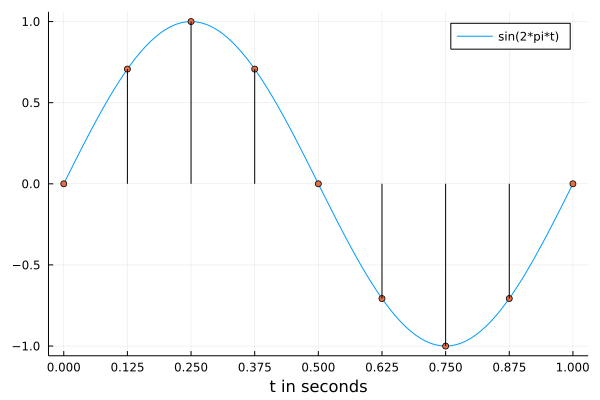
Fig. 13 Sine function running at 1 Hertz, sampled at 8 Hertz.¶
We can view the unit delay as a filter, as introduced in Fig. 14.

Fig. 14 The unit delay as a filter.¶
The unit delay has as input \(u = \{ u_0, u_1, u_2, \ldots \}\) has z-transform \(\displaystyle U(z) = \sum_{k=0}^\infty u_k z^{-k}\). The output \(y = \{ 0, u_0, u_1, u_2, \ldots \}\) has z-transform \(Y(z)\), computed below.
Therefore, the delay of a signal can be viewed as a filter, schematically represented in Fig. 15.

Fig. 15 Schematic representation of a filter.¶
For good understanding of this definition, as an exercise, show that the unit delay is a linear, time invariant, and causal filter.
Unit Impulse and Transfer Function¶
The unit impulse is \(\delta = \{ 1, 0, 0, \ldots \}\). The impulse response is \(h = F \delta = \{ h_0, h_1, h_2, \ldots \}\). Both unit impulse and impulse response are shown in Fig. 16.

Fig. 16 Schematic representation of the unit impulse and the impulse response.¶
For input \(u\), the \(k\)-th element in the output \(y\) is
The convolution is denoted by the operator \(\star\), as \(y = h \star u\).
In the frequency domain, the z-transforms of the input and output are
The impulse response has as z-transform \(\displaystyle H(z) = \sum_{k=0}^\infty h_k z^{-k}\). The z-transform of \(y = h \star u\) is then
Now we can explain the \(z^{-1}\) in the schematic Fig. 14 representing the unit delay as a filter by asking What is the transfer function of the unit delay filter? The transfer function is the z-transform of the impulse response:
The response of \(\{1, 0, 0, \ldots \}\) is \(\{0, 1, 0, 0, \ldots \}\).
The z-transform of \(\{0, 1, 0, 0, \ldots \}\) is \(z^{-1}\).
Thus \(z^{-1}\) is the transfer function of the unit delay filter.
Consider computing the output of a filter. Denote
then we can write any input \(u\) as \(\displaystyle u = \sum_{k=0}^\infty u_k \delta^{(k)}\).
The output \(y = F u\) can then be written as
because \(F\) is linear.
After decomposing any input \(u\) as linear combinations of properly delayed unit impulses, we construct a formula for the output:
The formula for \(y_k\) is a convolution of the input with the impulse response. We proved that the impulse response entirely determines a filter, as stated earlier in the theorem characterizing a linear, time invariant, and causal filter.
Let us now turn to the original function of a filter and removing a signal shown earlier in Fig. 13. Our signal is \(\{ u_0, u_1, u_2, u_3, u_4, u_5, u_6, u_7, u_0, \ldots \}\), where \(u_k = \sin(2\pi k/8)\), \(k=0,1,2,\ldots,7\). Observe, looking at Fig. 13, the symmetry of the samples:
Adding a delay will remove the signal. Let the output be defined as follows
This results in the removal of the signal, as \(y_0 = 0\), \(y_1 = 0\), \(y_2 = 0\), \(y_3 = 0\). The z-transform of \(y\) is \(Y(z)\):
The transfer function of the filter is \(H(z) = 1 + z^{-4}\).
Stability¶
In addition to working with linear, time invariant, and causal filters, we want filters that are stable.
What are bounded inputs and outputs? Some examples follow.
\(x = \{ 1, 1, 1, 1, 1, 1, 1, \ldots \}\) is bounded, and so is any constant signal.
\(x = \{ 1, 2, 4, 8, 16, 32, 64, \ldots \}\) is not bounded.
\(\displaystyle x = \left\{ 1, \frac{1}{2}, \frac{1}{4}, \frac{1}{8}, \frac{1}{16}, \frac{1}{32}, \frac{1}{64}, \ldots \right\}\) is bounded.
The impulse response determines a linear, time invariant, causal filter.
As a corollary, the transfer function \(H(z)\) of a stable filter converges absolutely and uniformly for all \(|z| \geq 1\) to a continuous function.
Amplitude Gain and Phase Shift¶
The theorem below provides another characterization of a filter.
We interpret the input \(u\) as
\(u = \sin(\omega t)\), \(\omega = 2 \pi n\), at \(n\) Hertz,
sampled at \(t = kT\), \(T\) is the sampling rate.
Complex numbers appear, the imaginary unit is \(i = \sqrt{-1}\).
The proof of the theorem uses complex numbers. We look at the response of the signal \(s = e^{i \omega T}\).
The input \(\displaystyle u = \left\{ s^k \vphantom{u^k} \right\}_{k=0}^\infty\). Let us compute \(y = h \star u\).
By the definition of \(H\): \(\displaystyle H(s) = \sum_{j=0}^\infty h_j s^{-j}\). So, we have:
Consider \(k \rightarrow \infty\) and apply the complex exponentiation to the sine function. Our input signal is \(s = e^{i \omega T}\).
It then follows:
and
We derived \(y_k = s^k H(s)\). Suppose \(H(e^{i \omega T}) = r e^{i \phi}\). What are \(r\) and \(\phi\)?
Then indeed, \(r = |H(e^{i \omega T})|\) and \(\phi = \mbox{arg} H(e^{i \omega T})\). The theorem is proven.
Exercises¶
What is the z-transform of a one Hertz sine function sampled at eight Hertz?
Show that the unit delay \(F = z^{-1}\) is linear, time invariant, and causal.
Noise often happens at high frequency. Give the transfer function of a filter to remove a signal at 60 Hz, sampled at 720 Hz.
Justify the design of your filter.
Which signals are also removed by your filter?
Consider the following transfer function
\[H(z) = \frac{2 z - 1}{z^2 - (5/2)z + 1}.\]Is the filter with this transfer function \(H\) stable? Justify your answer.
Bibliography¶
Richard C. Dorf and Robert H. Bishop: Modern Control Systems. Nineth Edition, Prentice Hall, 2001.
Charles R. MacCluer, middle of Chapter 3 of Industrial Mathematics. Modeling in Industry, Science, and Government, Prentice Hall, 2000.